





















모든 제품
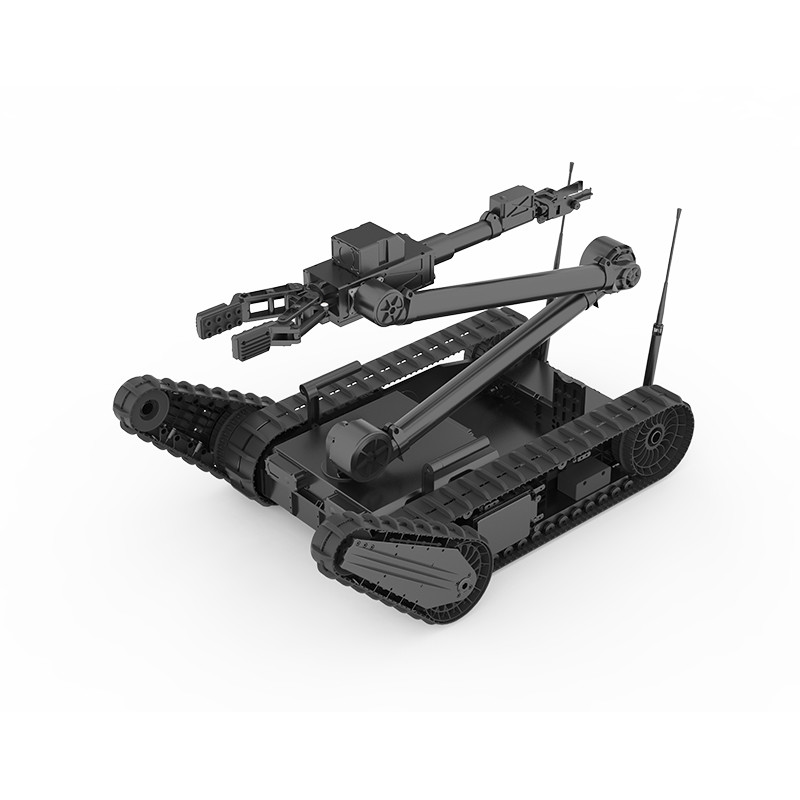
2000mm 팔 길이 원격 제어 폭발 장비를 제거하는 로봇 2 발톱





| 원래 장소 | 중국 |
|---|---|
| 브랜드 이름 | Particle |
| 모델 번호 | REOD400 |
| 가격 | $102,881 |
| 지불 조건 | T/T |

무료샘플과 쿠폰을 위해 나와 연락하세요.
WhatsApp:0086 18588475571
위챗: 0086 18588475571
스카이프: sales10@aixton.com
만약 당신이 어떠한 관심도 가지면, 우리가 24 시간 온라인 도움말을 제공합니다.
x제품 상세 정보
| 최대 스내치 무게 | ≥40kg | 2-클로 특허 디자인 | 여러 작업을 한 번에 해결할 수 있음 |
|---|---|---|---|
| 갈고리 발톱 | 2 | 지능형 사전 설정 제어 설계 | 개인화된 작업 자세 설정 |
| 7채널 비디오 이미지 | 더 풍부한 관찰 관점 | X-Y-Z 3차원 공간 로봇 팔 연결 설계 | 정확하게 제어할 수 있도록 도와줍니다. |
| 암 길이 | 2000 밀리미터 | 배기 깊음 | ≥200mm |
| 크기 | ≤830mm×600mm×460mm(완전 수납 시) | 무게 | 37kg 이하(배터리 2세트 포함) |
| 장애물 을 극복 하는 능력 | ≥300mm | 크로브 너비 | ≥400MM |
| 등판능력 | ≥45' | 계단 오르기 | ≥45' |
| 움직일 수 있는 관절 | 8 | 가장 멀리 있는 포착 거리 | ≥1650mm |
| 그리퍼의 최대 개방 폭 | ≥160mm | 인양 능력 | 6-16kg |
| 시공 방법 | 버튼 로커와 터치 스크린의 이중 모드 작동 | 제어 방법 | 케이블 제어≥100m(표준 케이블),무선 제어≥1000m(실외) |
| 배터리 수명(정상 온도) | ≥2H | IP 등급 | IP65 |
| 강조하다 | 2000mm 폭발무기 제거 로봇,2 발톱 폭발무기 제거 로봇,2 발톱 로봇 eod |
||
제품 설명
원격 제어 폭발 장비를 제거하는 로봇 ≥200mm의 왓딩 깊이
|
신청서 하운드 시리즈의 미래지향적인 디자인을 계승하여 JP REOD500는 스윙 팔 크롤러 걷기 플랫폼을 사용합니다.주식 크롤러와 스윙 팔 장애물 크롤러를 결합하는이 설계는 이동성을 향상시킬 뿐만 아니라 다양한 지형에서도 안정성을 보장합니다.JP REOD500을 EOD 임무에 활용할 수 있는 다양한 도구로 만드는 것.
기능성 위험 현장에 접근하기 위한 원격 제어,위험의 잠재적 원천을 조사, 임무 목표에 따라 폐기 조치를 취하거나 위험을 옮기기최전선 근로자와 대중을 신체 부상으로부터 보호.
특징 1- 향상 된 기계 팔 설계, 크게 향상 된 잡기 성능; ★2. "2-발톱" 특허 디자인, 여러 작업을 동시에 해결할 수 있습니다. 3. 그래픽으로 이중 모드 작동, 편리하고 신뢰할 수있는 운영 경험; ★4. 원격 3D 실시간 디스플레이, 눈 앞에 정밀한 작동; ★5. 지능형 "예정" 제어 설계, 개인 설정 작업 자세; ★ 6. 자동 계산에 기반 한 "X-Y-Z" 3 차원 공간 로봇 팔 연결 설계는 정확하게 제어 할 수 있습니다. 77채널 비디오 이미지, 더 풍부한 관측 관점 8자유 8도 로봇 팔 설계, 더 유연한 제어 9다양한 확장 도구는 다양한 작업 조건에 침착하게 대처하기 위해 빠르게 교체 할 수 있습니다.
기술 매개 변수
REOD500 세부 정보
|