





















모든 제품
X-Y-Z 좌표 로봇 팔 중형 EOD 로봇







| 원래 장소 | 중국 |
|---|---|
| 브랜드 이름 | Particle |
| 모델 번호 | REOD500 |
| 최소 주문 수량 | 1 |
| 가격 | $205,761 |
| 지불 조건 | T/T |

무료샘플과 쿠폰을 위해 나와 연락하세요.
WhatsApp:0086 18588475571
위챗: 0086 18588475571
스카이프: sales10@aixton.com
만약 당신이 어떠한 관심도 가지면, 우리가 24 시간 온라인 도움말을 제공합니다.
x제품 상세 정보
| 최대 속도 | ≥2m/s(5단 기어, 연속 가변) | 특별 특징 | 방폭, 방수, 원격 무장 해제 기능 |
|---|---|---|---|
| 제품 이름 | 임무 목표 하운드-III EOD 로봇 폐기 조치 및 위험 전송 | 특징 | 1. 고강도 기계 팔 설계로 강력한 스내치 성능 제공; 2. "Christie" 서스펜션 트랙 시스템, 평지에서 걷는 것과 같은 복잡한 지형; 3. 그래픽 듀얼 |
| 로봇 플랫폼 무게 | ≤350kg(배터리 포함); | 로봇 플랫폼의 왓딩 깊이 | ≥500mm |
| 신청서 | 급조 폭발 장치에 대한 대응 | 로봇 플랫폼 크기 | 1600×850×1300mm (완전 매장) |
| 로봇 사이즈 | ≤950×650×650mm(완전히 수납됨) | 로봇 중량 | 50kg 이하(배터리 2세트 포함) |
| 장애물 을 극복 하는 능력 | ≥400MM | 크로브 너비 | ≥400MM |
| 등판능력 | ≥45' | 계단 오르기 | ≥45' |
| 배기 깊음 | ≥200mm | 배터리 수명(정상 온도) | ≥3h |
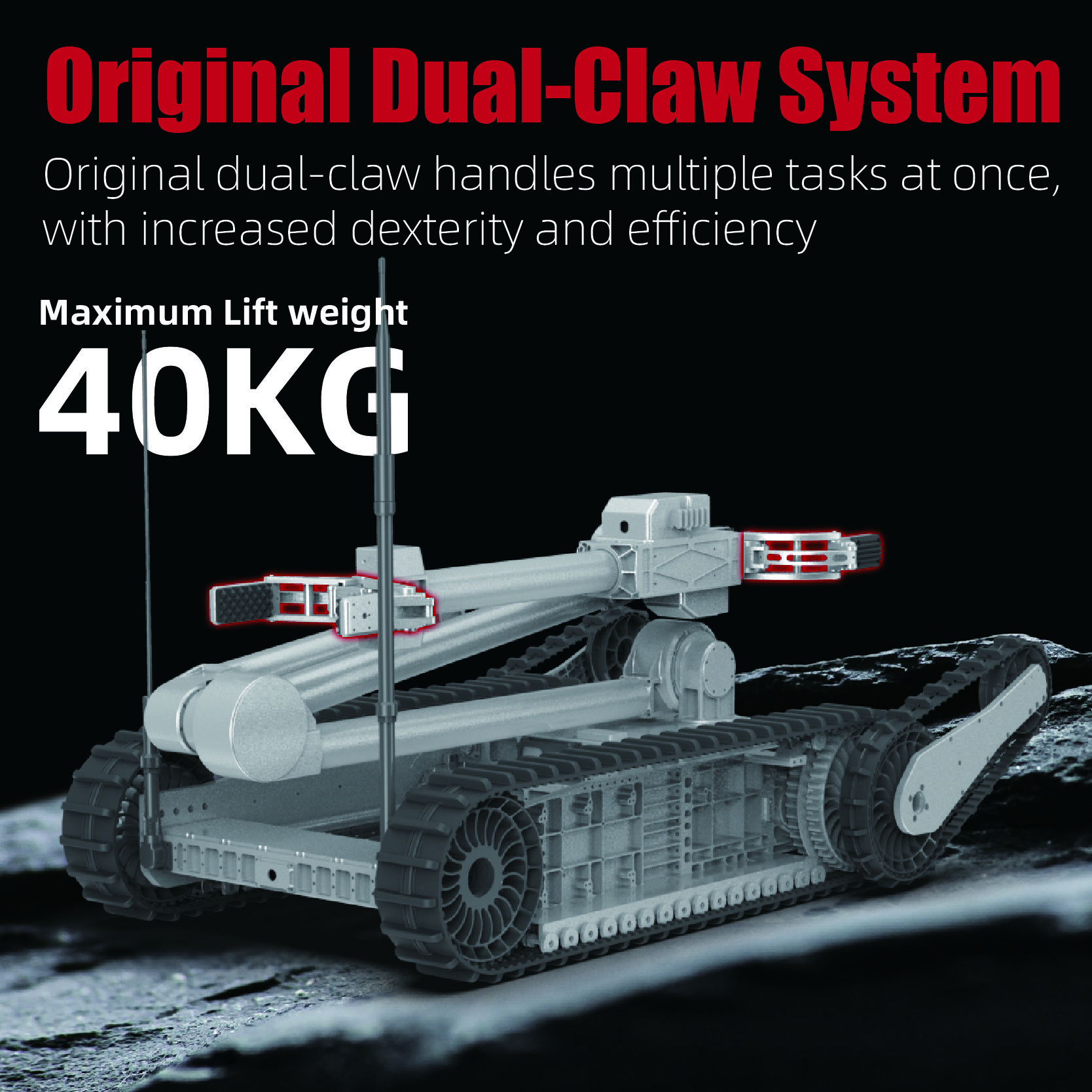
| 암 길이 | 2000 밀리미터 | 최대 스내치 무게 | ≥40kg |
| 갈고리 발톱 | 2 | 움직일 수 있는 관절 | 8 |
| 컨트롤러 크기 | 270mm×170mm×100mm 이하 | 컨트롤러 무게 | ≤1.2kg(배낭 제외) |
| 컨트롤러 디스플레이 화면 | 7인치 LCD | 비디오 디스플레이 | 7채널(그 중 하나에는 자동 초점 줌 기능 포함) |
| 시공 방법 | 버튼 로커와 터치 스크린의 이중 모드 작동 | 제어 방법 | 케이블 제어≥100m(표준 케이블),무선 제어≥1000m(실외) |
| 로봇 플랫폼 IP 등급 | IP66 | 팔 IP 등급 | IP66 |
| 작동 온도 | -40℃~+50℃ | 저장 온도 | -45℃~+60℃ |
| 강조하다 | 연동 로봇 팔 폭발 무기 제거 로봇,중형 폭발무기 제거 로봇,IP66 로봇 eod |
||
제품 설명
고급 X-Y-Z 좌표 로봇 팔 중형 EOD 로봇 제조업체
설명 및 특징
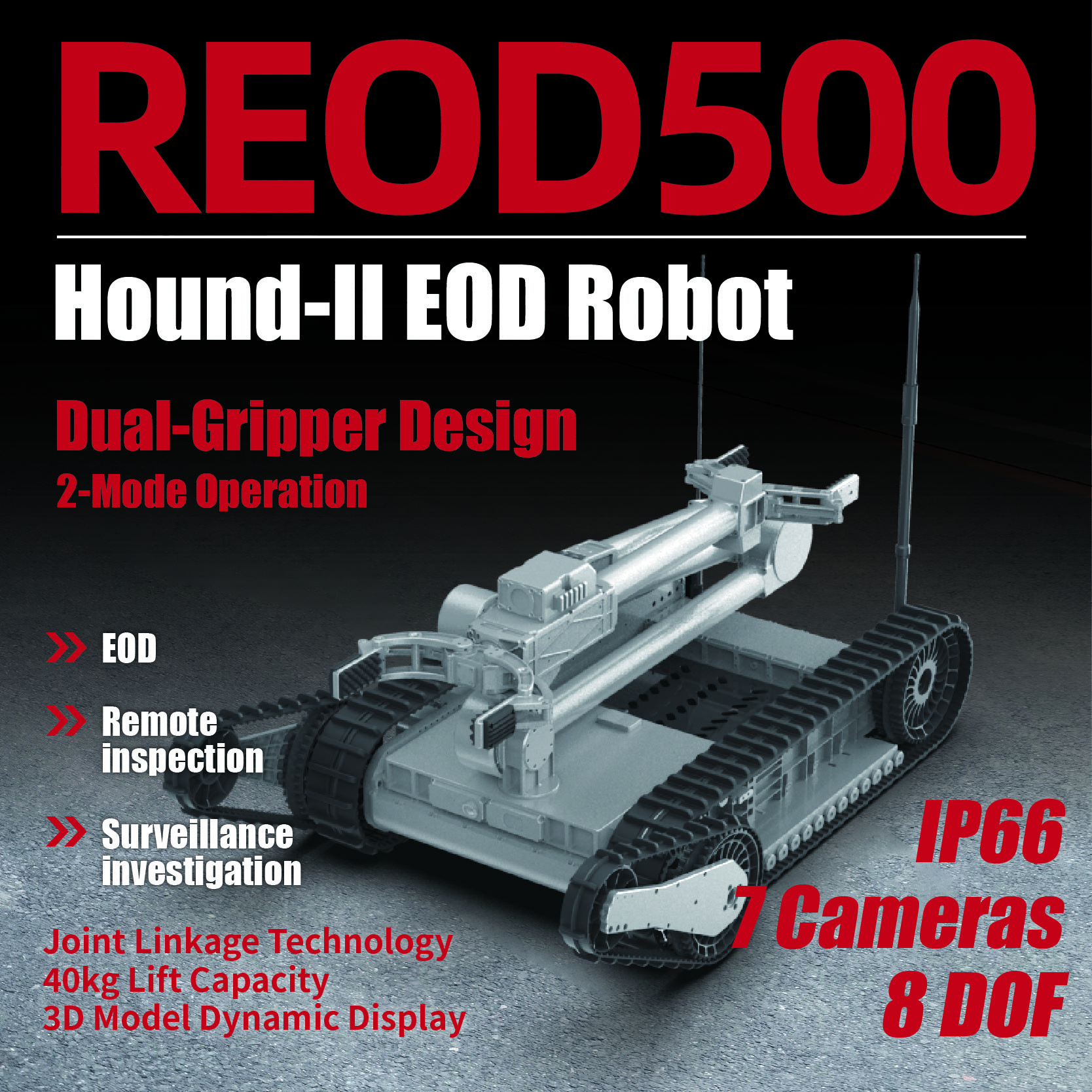
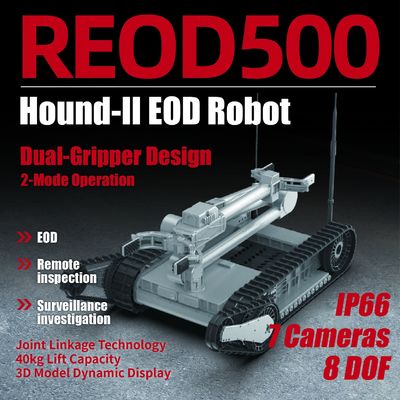
JP REOD500 EOD 로봇은 고위험 환경에서 폭발성 무기 처리를 위한 첨단 솔루션입니다.스윙 팔 크롤러 시스템으로 구성된 주 크롤러와 스윙 팔 장애물 메커니즘을 결합한이 설계는 로봇의 장애물 탐색 능력을 크게 향상시켜 EOD 작업에서 견고하고 신뢰할 수있는 성능을 보장합니다.이 로봇 은 여러 차원 의 자유 를 가진 로봇 팔 으로 장착 되어 있으며, 그 팔 은 강력 한 포착 능력 과 조작 능력 을 제공한다JP REOD500의 크기는 ≤900mm × 650mm × 500mm (완전 저장) 이며 무게는 ≤42kg입니다. 최대 속도는 ≥2.0m/s이며 장애물 경로는 ≥320mm입니다.그리고 45°까지의 계단과 계단 올라가는 능력, 다양한 지형에서 우수한 기동성을 보장합니다.
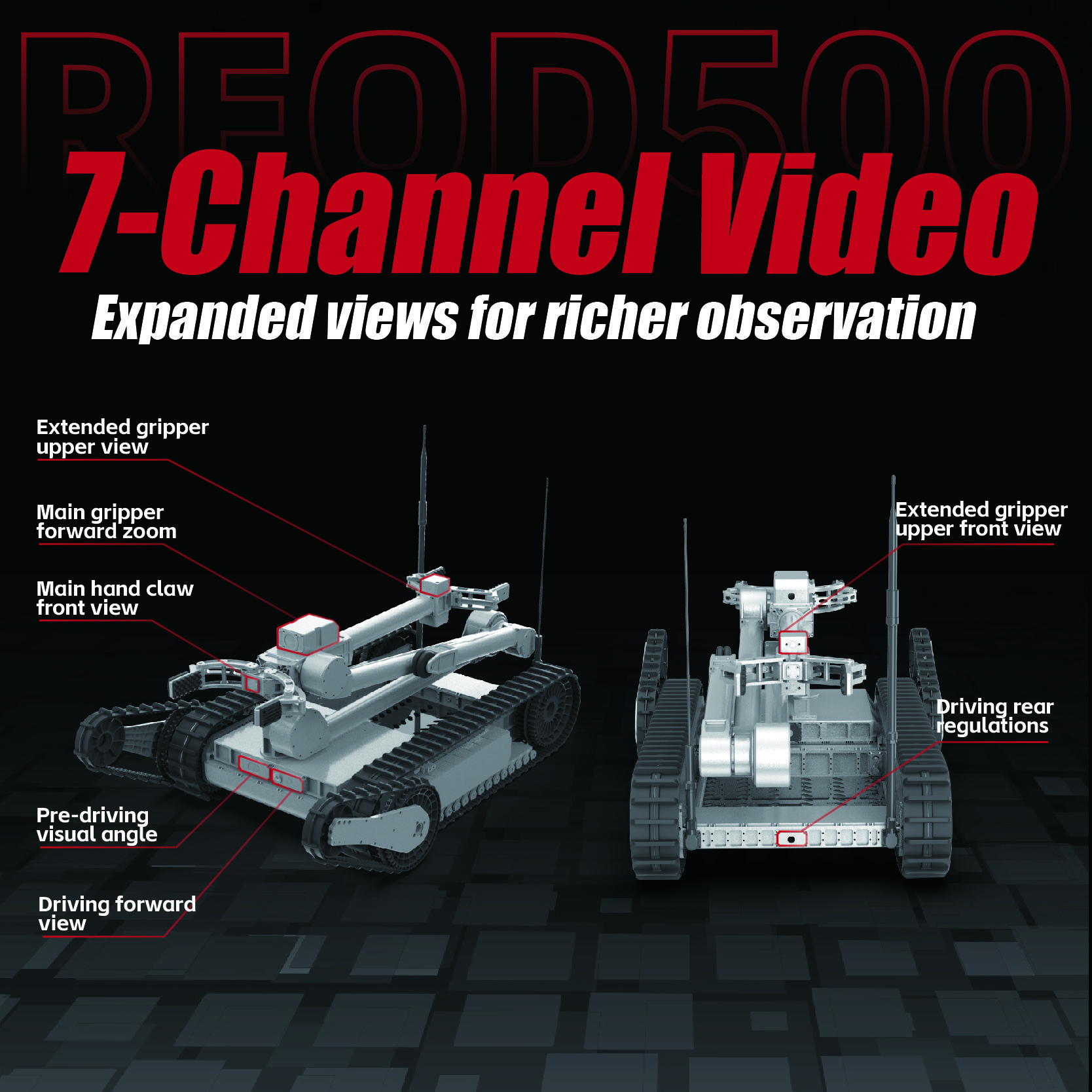
자유의 8도 조작기로 장착된 JP REOD500은 최대 잡기 높이 ≥1800mm (주 손톱) 및 가장 먼 잡기 거리가 ≥1400mm (주 손톱) 로 정밀한 제어 기능을 제공합니다.로봇은 7채널 비디오 디스플레이를 지원합니다, 더 풍부한 관측 관점을 가능하게 하고 원격 3D 자세 실시간 표시 기능을 갖추고 있습니다.먼지와 물에 저항하는 IP67 등급, 120m까지 케이블 제어 및 1200m까지 무선 제어를 포함하는 제어 방법, JP REOD500는 도전적인 조건에서 신뢰성과 다재다능성을 위해 만들어졌습니다.특정 운영 필요를 충족시키기 위해 OEM 및 ODM 사용자 정의 옵션을 제공합니다.
향상 된 기계적 팔 설계 ∙ 크게 향상 된 잡기 성능
JP REOD500는 잡기 능력을 크게 향상시키는 향상된 기계 팔 디자인을 갖추고 있습니다.이 첨단 설계 는 로봇 이 여러 가지 위험 한 물체 를 보다 정확 하고 강력 하게 다루도록 한다, EOD 운영의 전반적인 효율성을 향상시킵니다.
혁신적 "두 발톱" 특허 디자인
특허를 받은 "2개의 발톱" 설계로 JP REOD500는 여러 가지 작업을 동시에 해결할 수 있습니다.문을 열거나 다른 보조 작업을 수행하는 동안 물건을 잡는 것과 같이, EOD 임무에 매우 효과적입니다.
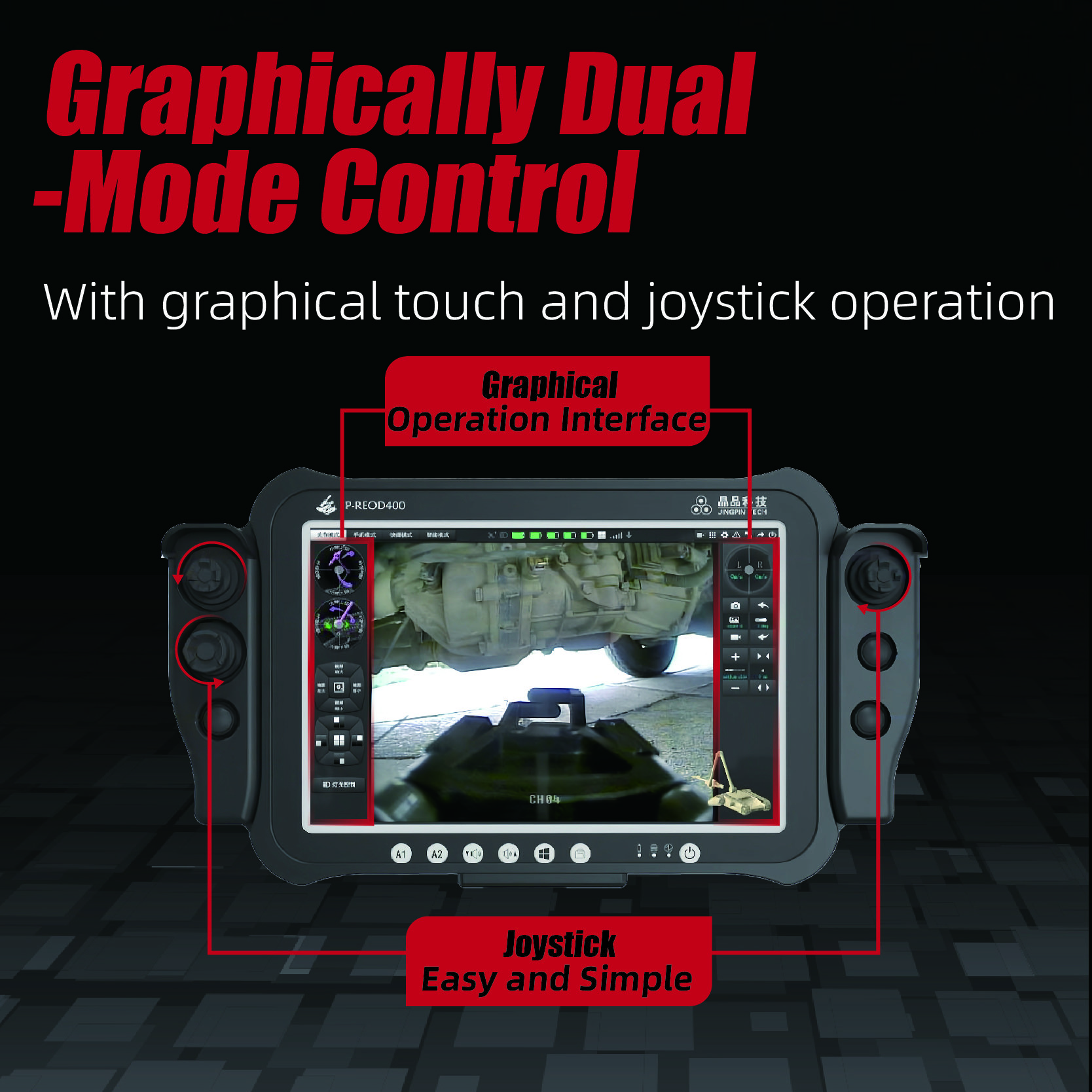
그래픽적으로 듀얼 모드 운영
그래픽 듀얼 모드 조작은 사용자에게 로봇을 제어하는 직관적인 인터페이스를 제공합니다. 터치 스크린과 조이스틱 제어 모두 지원됩니다.높은 스트레스 환경에서의 사용 편의성과 신뢰성을 보장합니다.이 디자인은 사용자가 복잡한 버튼 기능을 기억할 필요성을 제거하여 훈련 시간을 줄이고 운영 효율성을 향상시킵니다.
원격 3차원 실시간 디스플레이
JP REOD500는 로봇의 상태를 실시간으로 피드백하기 위해 고급 3D 가상 디스플레이 기술을 사용합니다. 이 기능은 운영자가 다양한 각도에서 로봇의 3D 상태를 볼 수 있습니다.로봇의 위치와 환경에 대한 직관적이고 상세한 이해를 제공합니다., 심지어 시선 너머에서 작동 할 때.
지능형 사전 설정 제어 설계 工作 자세의 개인 설정
지능형 "프리셋" 제어 설계는 JP REOD500가 사용자의 필요에 따라 한 번의 클릭으로 자동으로 미리 설정된 위치에 도달 할 수 있습니다. 이 기능은 작동 프로세스를 단순화합니다.수동 개입을 줄이고 신속하고 신뢰할 수 있는 작업 수행을 보장합니다..
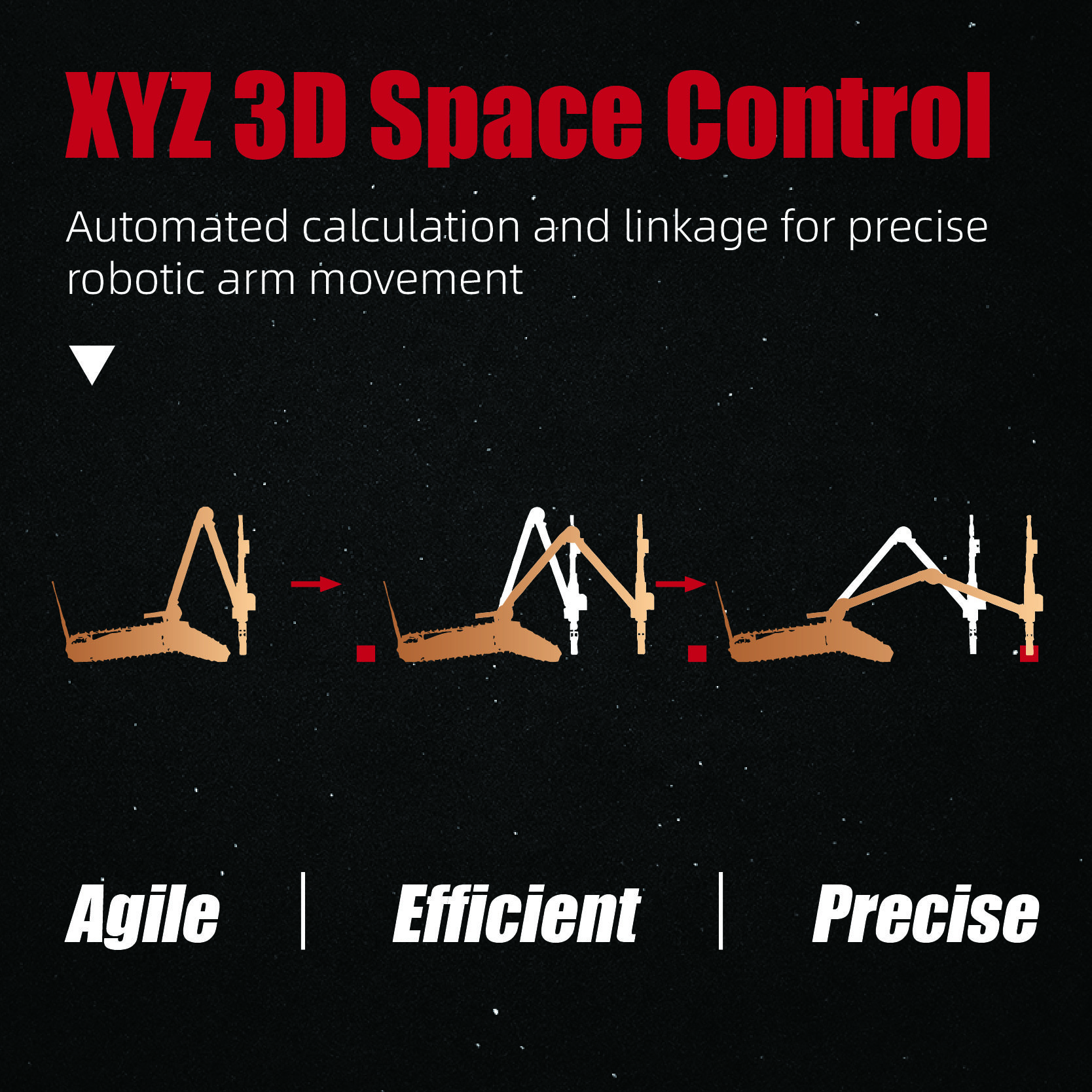
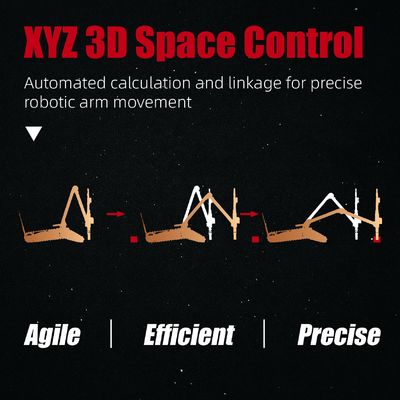
"X-Y-Z" 3차원 공간 로봇 팔 연계 설계
JP REOD500는 자동 계산에 기반한 "X-Y-Z" 3차원 로봇 팔 연결 디자인을 사용하여 로봇의 움직임에 대한 정확한 제어 기능을 제공합니다.이 설계 는 폭탄 제거 작업 의 효율성 과 정확성 을 높인다, 전통적인 단일 관절 제어에 비해 평균 작동 시간을 최대 80%까지 줄입니다.
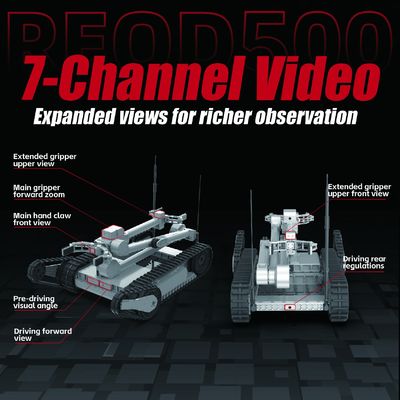
7채널 영상 시스템
7채널 비디오 시스템으로 장착된 JP REOD500은 여러 관측 각도를 제공하여 상황 인식을 향상시킵니다.주식 칩 모드, 그리고 보조 손잡이 모드, 최적의 시각을 위해 운영 맥락에 적응.
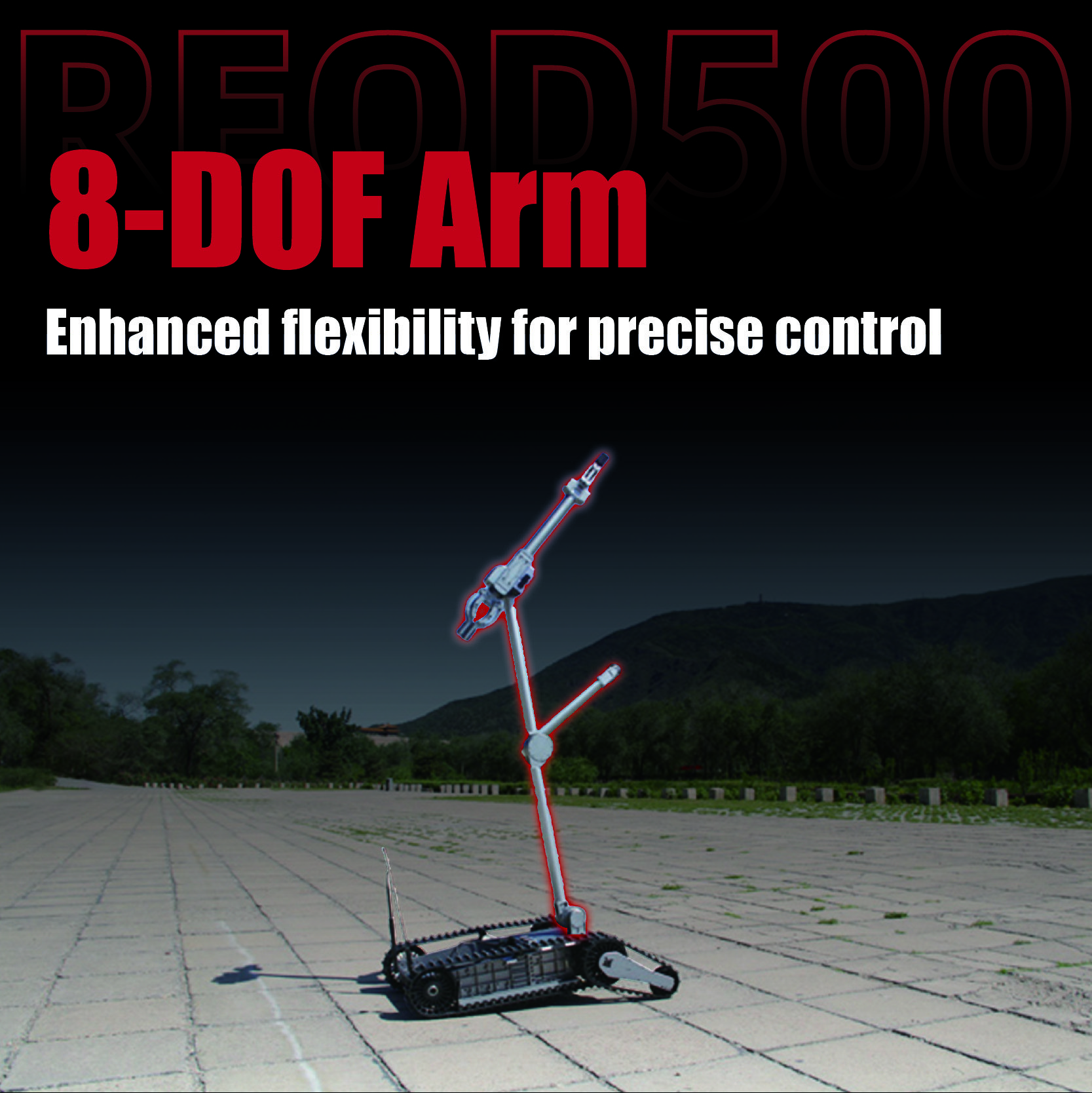
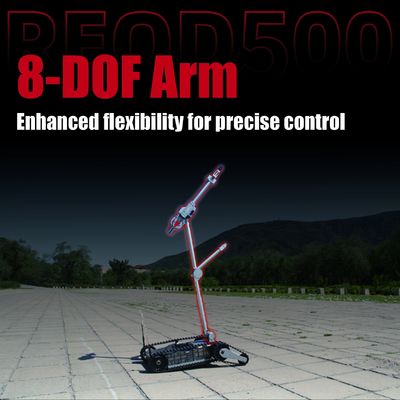
자유 8도 로봇 팔 설계 ∙ 보다 유연한 제어
자유 8도 로봇 팔 디자인은 JP REOD500에 강력한 공간 도달 능력을 부여하여 높고 낮고 깊은 구덩이 또는 테이블 톱 환경에서 작업을 수행 할 수 있습니다.이 유연성은 정확성과 적응력을 필요로하는 다양한 EOD 작업에 적합합니다.
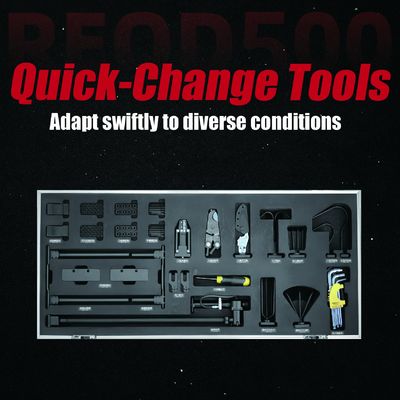
다재다능 한 신속 교체 도구 시스템 다양한 작업 조건에 적응
JP REOD500는 다재다능한 빠른 변경 도구 시스템으로 장착되어 있으며, 여러 가지 잡기 도구 세트, 기본 도구 세트 및 확장 된 도구 세트를 포함합니다.이러한 도구는 특정 운영 요구 사항에 따라 빠르게 교체 할 수 있습니다., 로봇이 다양한 작업 조건에 원활하게 적응하고 다양한 종류의 위험을 효과적으로 처리 할 수 있습니다.
신청서
이미지 갤러리
기술 매개 변수
| 로봇 플랫폼 | |
|
크기 |
≤950×650×650mm (완전 매장) |
|
무게 |
≤50kg ((배터리 세트 2개 포함) |
|
최대 속도 |
≥2m/s ((5개의 변속기, 지속적으로 변동) |
|
장애물 을 극복 할 수 있는 능력 |
≥400mm |
|
크로브 너비 |
≥400mm |
|
분류 가능성 |
≥45° |
|
계단 을 오르 |
≥45° |
|
배기 깊이 |
≥200mm |
|
배터리 수명 (정상적인 온도) |
≥3시간 |
|
로봇 팔 포착 성능 |
|
|
팔 길이 |
2000mm |
|
최대 스냅 무게 |
≥40kg |
|
발톱 |
2 |
|
이동성 관절 |
8 |
|
휴대용 컨트롤러 |
|
|
크기 |
≤270mm × 170mm × 100mm |
|
무게 |
≤1.2kg ((후낭 없이) |
|
화면 표시 |
7' LCD |
|
비디오 표시 |
7채널, 하나는 자동 초점 확대 기능이 있습니다. |
|
작동 방법 |
버튼 로커와 터치 스크린의 두 가지 모드 작동 |
|
제어 방법 |
케이블 제어 ≥100m (표준 케이블) 무선 제어 ≥1000m (외관) |
|
보호 수준 및 환경 적응력 |
|
|
로봇 플랫폼 |
IP66 |
|
팔 |
IP66 |
|
작동 온도 |
-40°C+50°C |
|
저장 온도 |
-45°C+60°C |
저희와 연락
에이미 부인