





















모든 제품
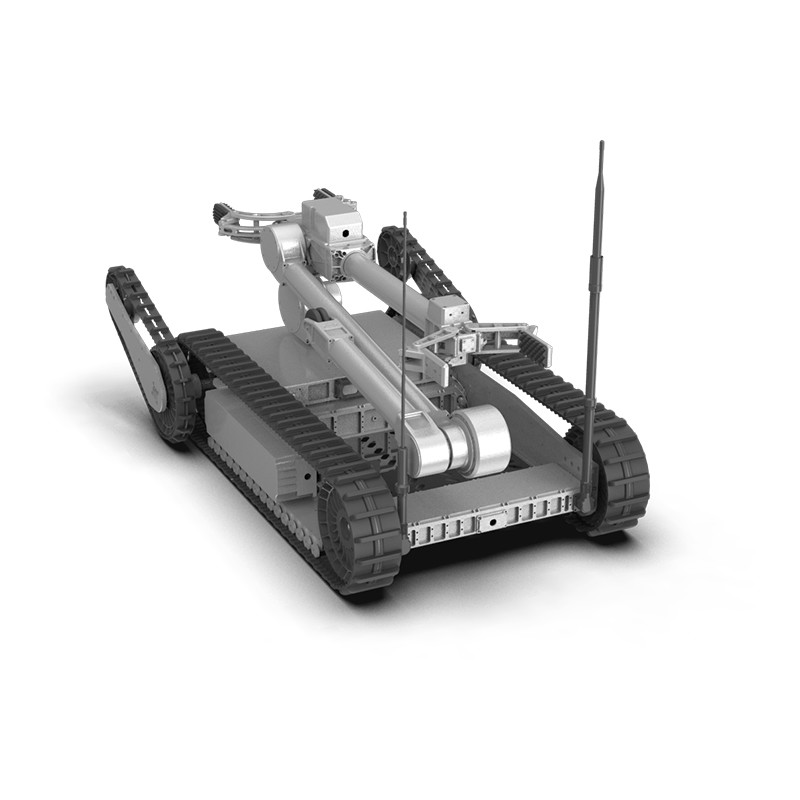
X-Y-Z 3차원 우주 로봇 팔 폭발 무기 폐기 로봇





| 원래 장소 | 중국 |
|---|---|
| 브랜드 이름 | Particle |
| 모델 번호 | REOD500 |
| 최소 주문 수량 | 1 |
| 가격 | $205,761 |
| 지불 조건 | T/T |

무료샘플과 쿠폰을 위해 나와 연락하세요.
WhatsApp:0086 18588475571
위챗: 0086 18588475571
스카이프: sales10@aixton.com
만약 당신이 어떠한 관심도 가지면, 우리가 24 시간 온라인 도움말을 제공합니다.
x제품 상세 정보
| 조작기 팔 | 그래요 | X-Y-Z 3차원 공간 로봇 팔 연결 설계 | 정확하게 제어할 수 있도록 도와줍니다. |
|---|---|---|---|
| 자유 8도 로봇 팔 설계 | 보다 유연한 제어 | 작동 온도 | -40℃~+50℃ |
| 계단 오르기 | ≥45' | 지능형 사전 설정 제어 설계 | 개인화된 작업 자세 설정 |
| 로봇 사이즈 | ≤950×650×650mm(완전히 수납됨) | 로봇 중량 | 50kg 이하(배터리 2세트 포함) |
| 최대 속도 | ≥2m/s(5단 기어, 연속 가변) | 장애물 을 극복 하는 능력 | ≥400MM |
| 크로브 너비 | ≥400MM | 등판능력 | ≥45' |
| 배기 깊음 | ≥200mm | 배터리 수명(정상 온도) | ≥3h |
| 암 길이 | 2000 밀리미터 | 최대 스내치 무게 | ≥40kg |
| 갈고리 발톱 | 2 | 움직일 수 있는 관절 | 8 |
| 컨트롤러 크기 | 270mm×170mm×100mm 이하 | 컨트롤러 무게 | ≤1.2kg(배낭 제외) |
| 컨트롤러 디스플레이 화면 | 7인치 LCD | 비디오 디스플레이 | 7채널(그 중 하나에는 자동 초점 줌 기능 포함) |
| 시공 방법 | 버튼 로커와 터치 스크린의 이중 모드 작동 | 제어 방법 | 케이블 제어≥100m(표준 케이블),무선 제어≥1000m(실외) |
| 로봇 플랫폼 IP 등급 | IP66 | 팔 IP 등급 | IP66 |
| 저장 온도 | -45℃~+60℃ | ||
| 강조하다 | 3차원 폭발무기 처리 로봇,7채널 폭발무기 처리 로봇,IP66 처리 로봇 |
||
제품 설명
X-Y-Z 3차원 우주 로봇 팔 폭발 무기 폐기 로봇
|
신청서 JP REOD500는 하운드 시리즈의 혁신적인 디자인 원칙을 바탕으로 주식 크롤러와 스윙 팔 장애물 크롤러를 통합하는 스윙 팔 크롤러 시스템을 갖추고 있습니다.이 독특 한 조합 은 로봇 이 장애물 을 극복 하는 능력 을 크게 향상 시킨다, 그 역동성과 안정성을 어려운 환경과 위험한 환경에서도 비교할 수 없도록 제공하여 EOD 임무의 안전성과 효율성을 향상시킵니다.
기능성 위험 현장에 접근하기 위한 원격 제어,위험의 잠재적 원천을 조사, 임무 목표에 따라 폐기 조치를 취하거나 위험을 옮기기최전선 근로자와 대중을 신체 부상으로부터 보호.
특징 1- 향상 된 기계 팔 설계, 크게 향상 된 잡기 성능; ★2. "2-발톱" 특허 디자인, 여러 작업을 동시에 해결할 수 있습니다. 3. 그래픽으로 이중 모드 작동, 편리하고 신뢰할 수있는 운영 경험; ★4. 원격 3D 실시간 디스플레이, 눈 앞에 정밀한 작동; ★5. 지능형 "예정" 제어 설계, 개인 설정 작업 자세; ★ 6. 자동 계산에 기반 한 "X-Y-Z" 3 차원 공간 로봇 팔 연결 설계는 정확하게 제어 할 수 있습니다. 77채널 비디오 이미지, 더 풍부한 관측 관점 8자유 8도 로봇 팔 설계, 더 유연한 제어 9다양한 확장 도구는 다양한 작업 조건에 침착하게 대처하기 위해 빠르게 교체 할 수 있습니다.
기술 매개 변수
REOD500 세부 정보
|